jahr
2019
erwähnungen
–
disciplines
industrial design
3D modeling
digital rendering
robotic concept
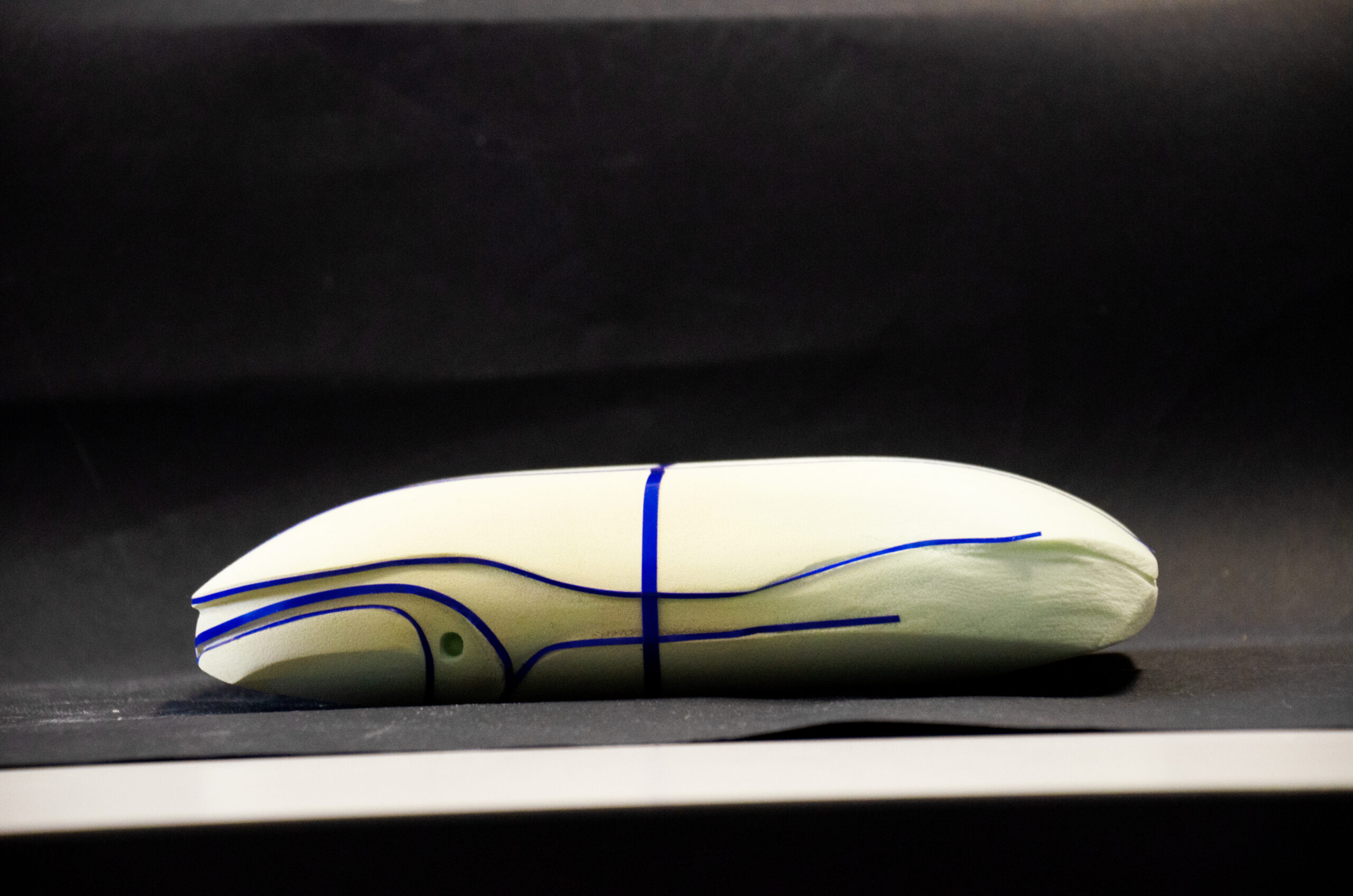
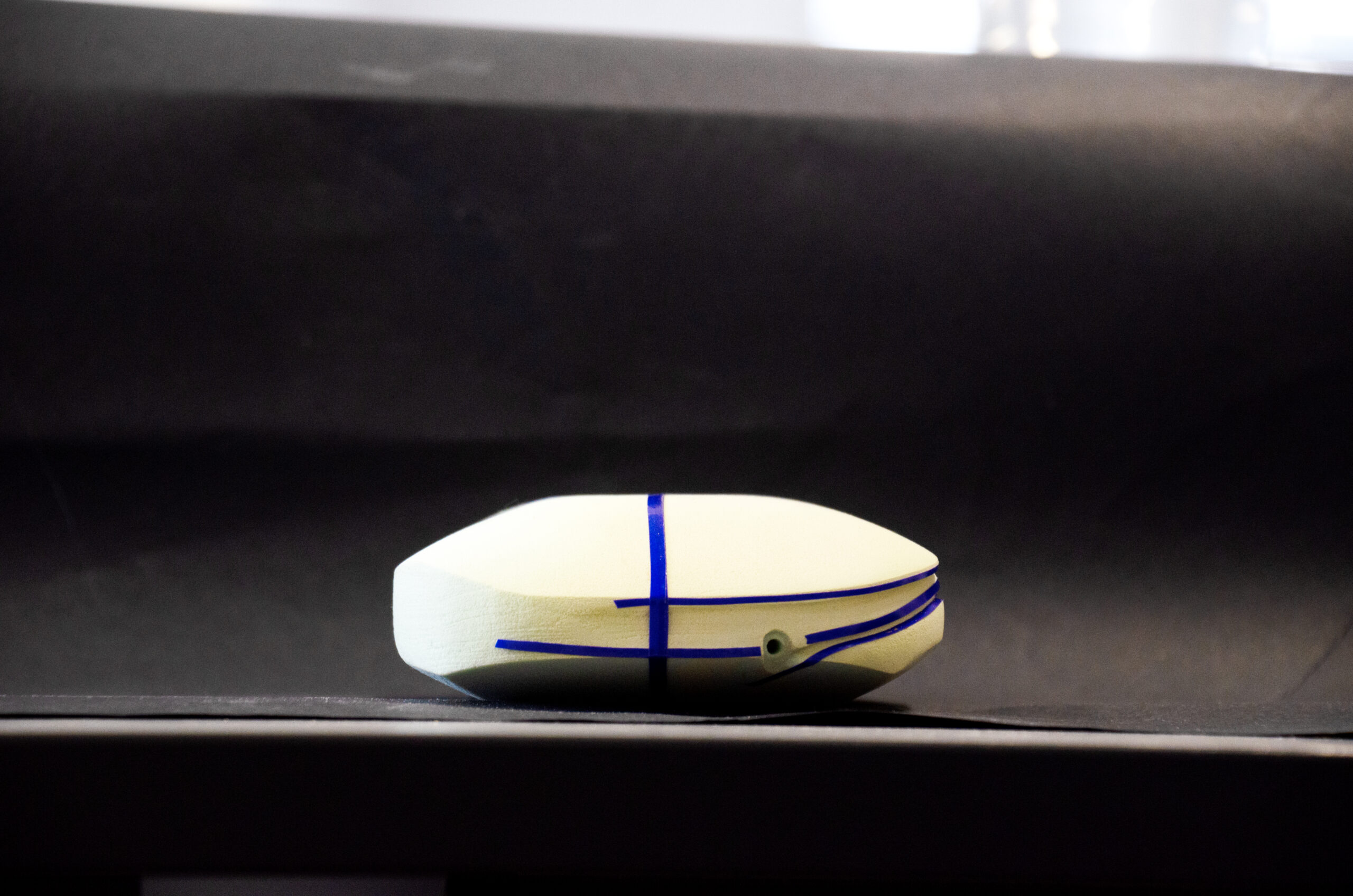
model making
collaboration
Tullio Maglia
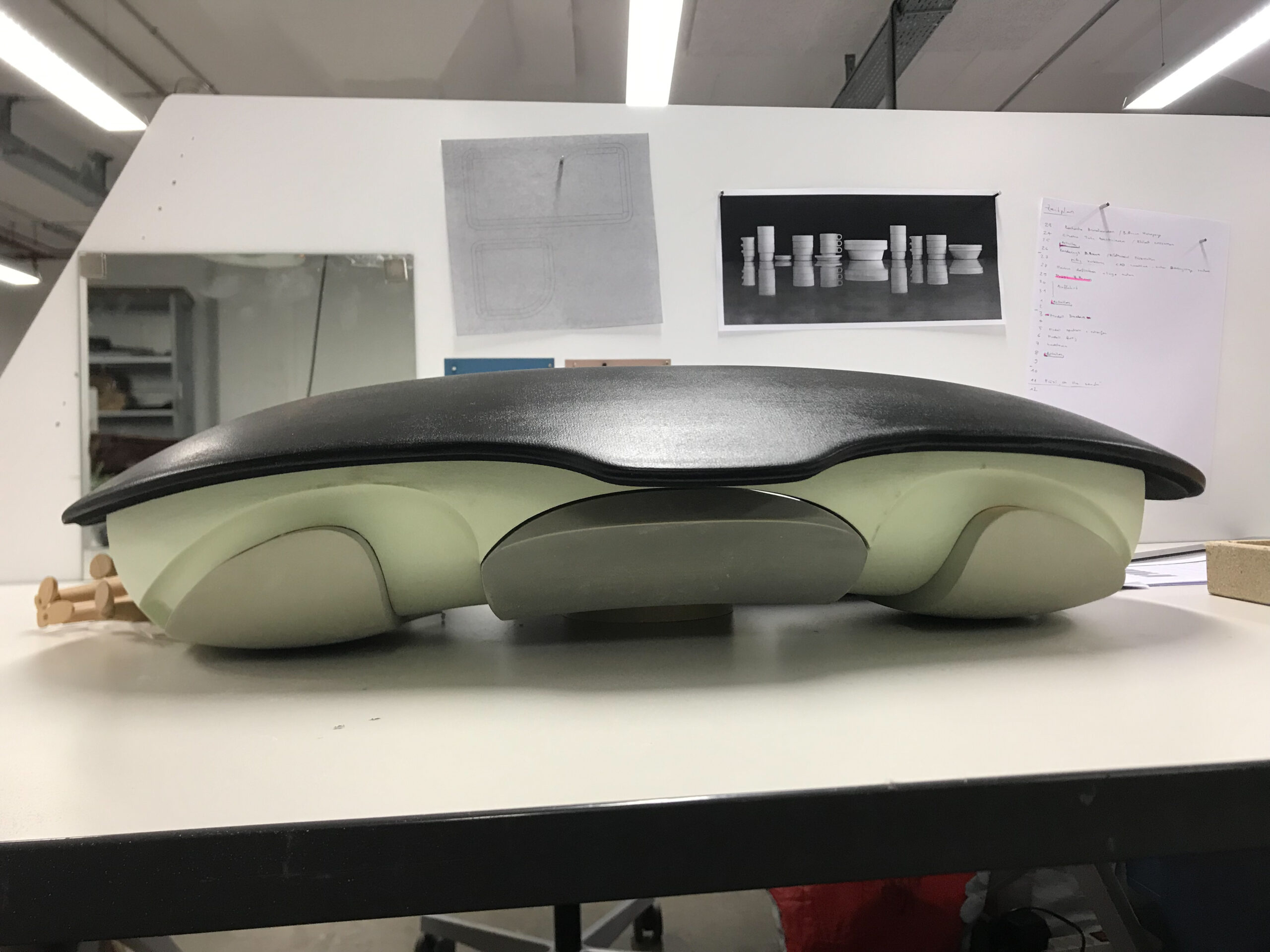
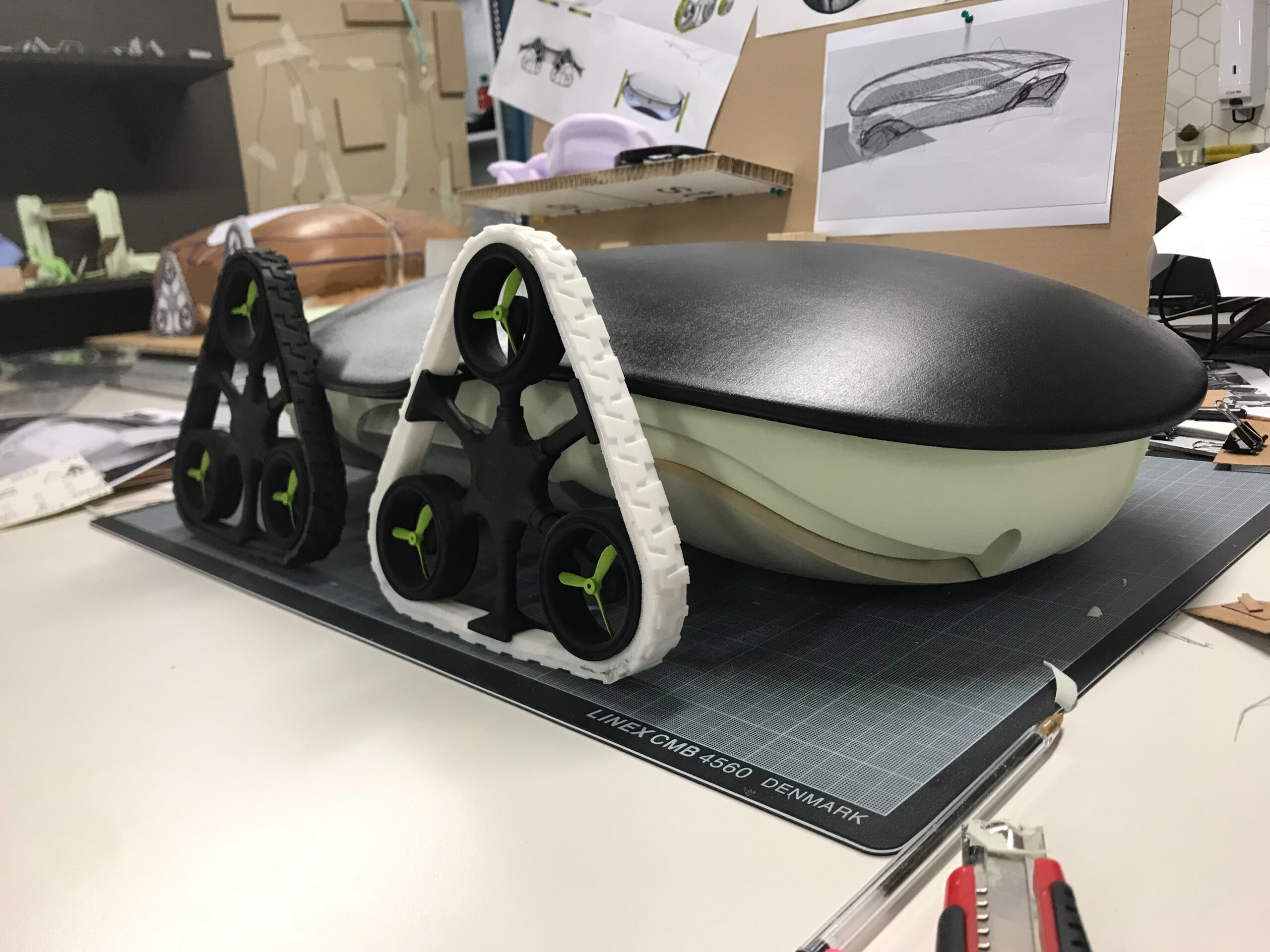
TR3
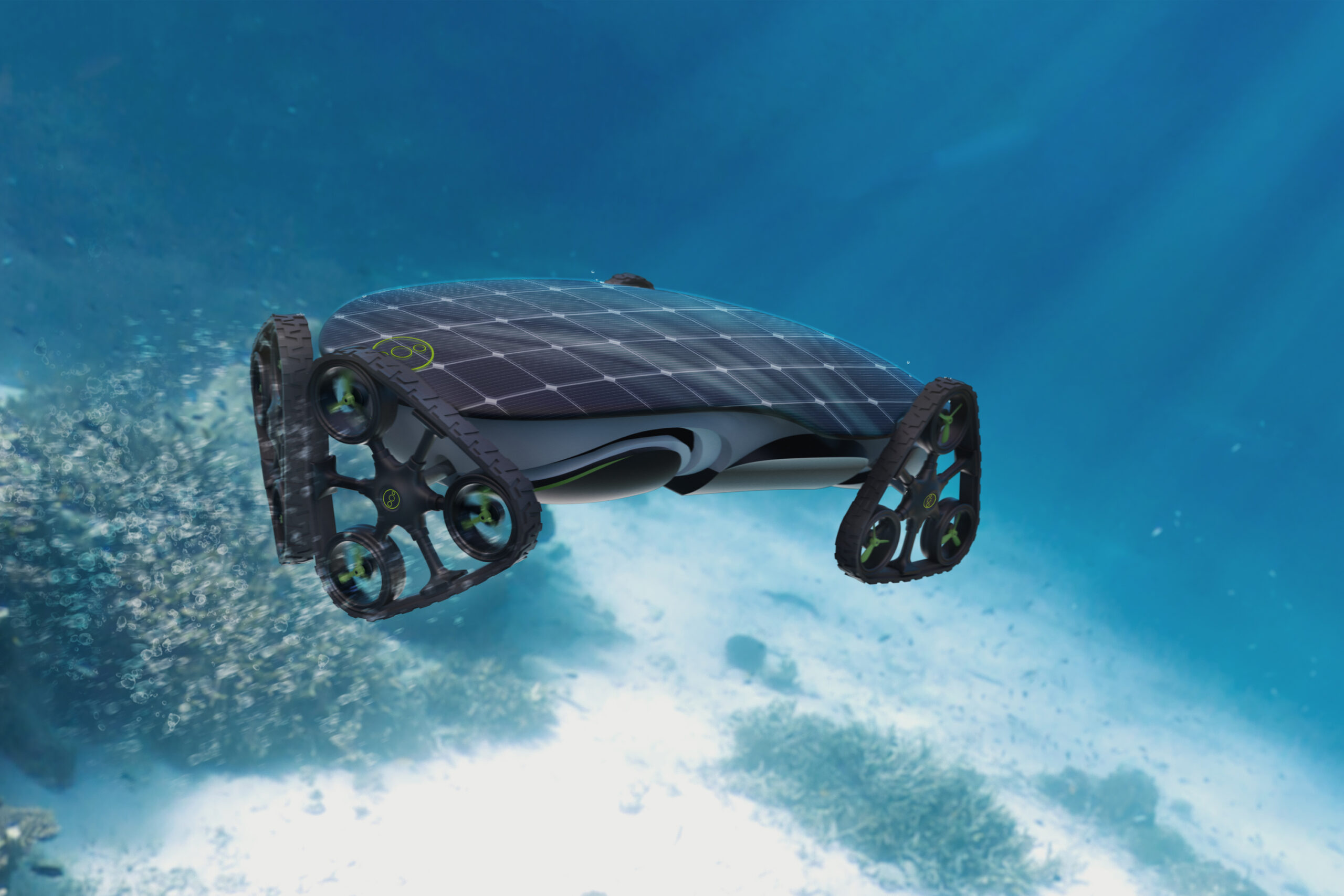
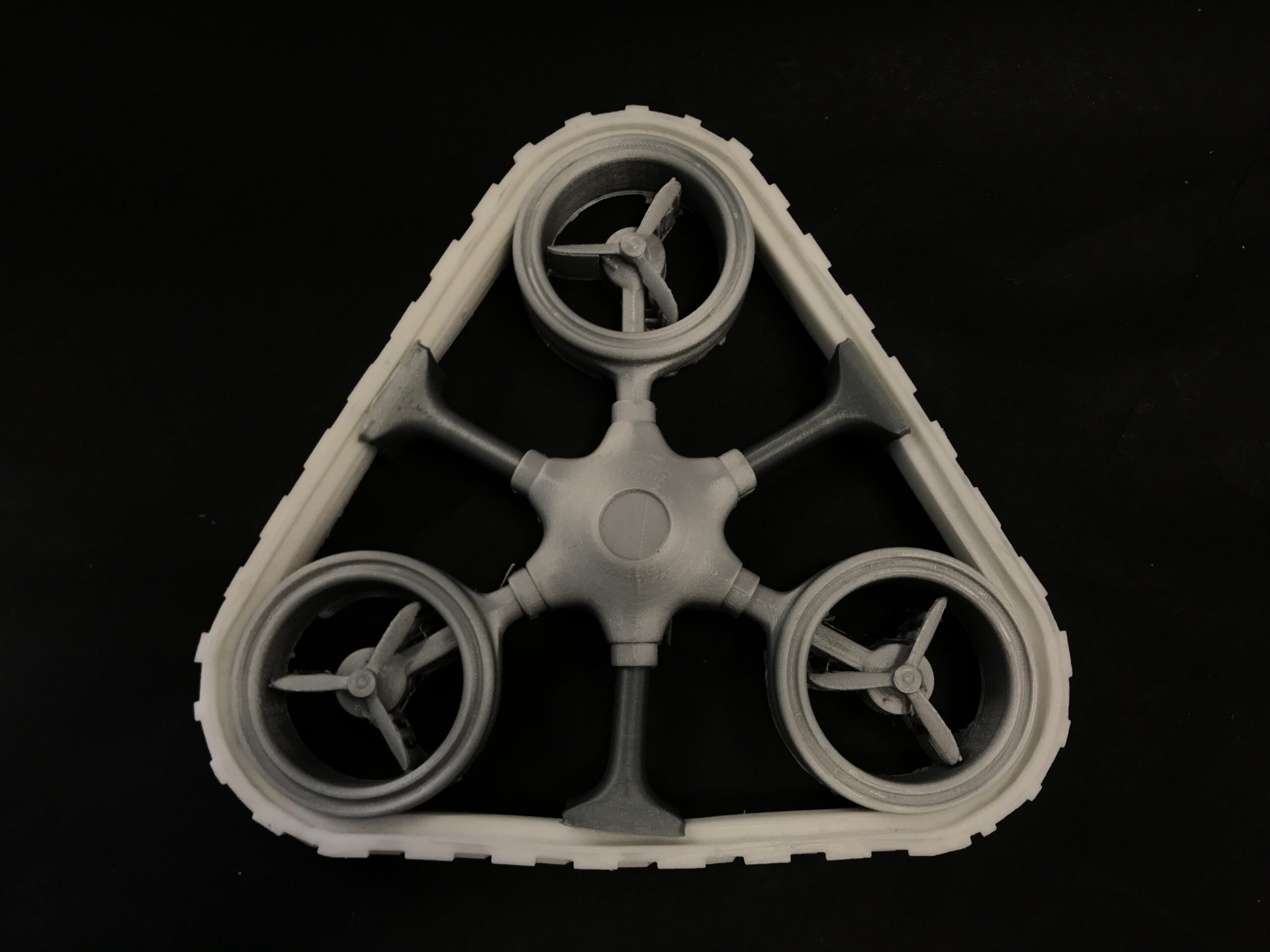
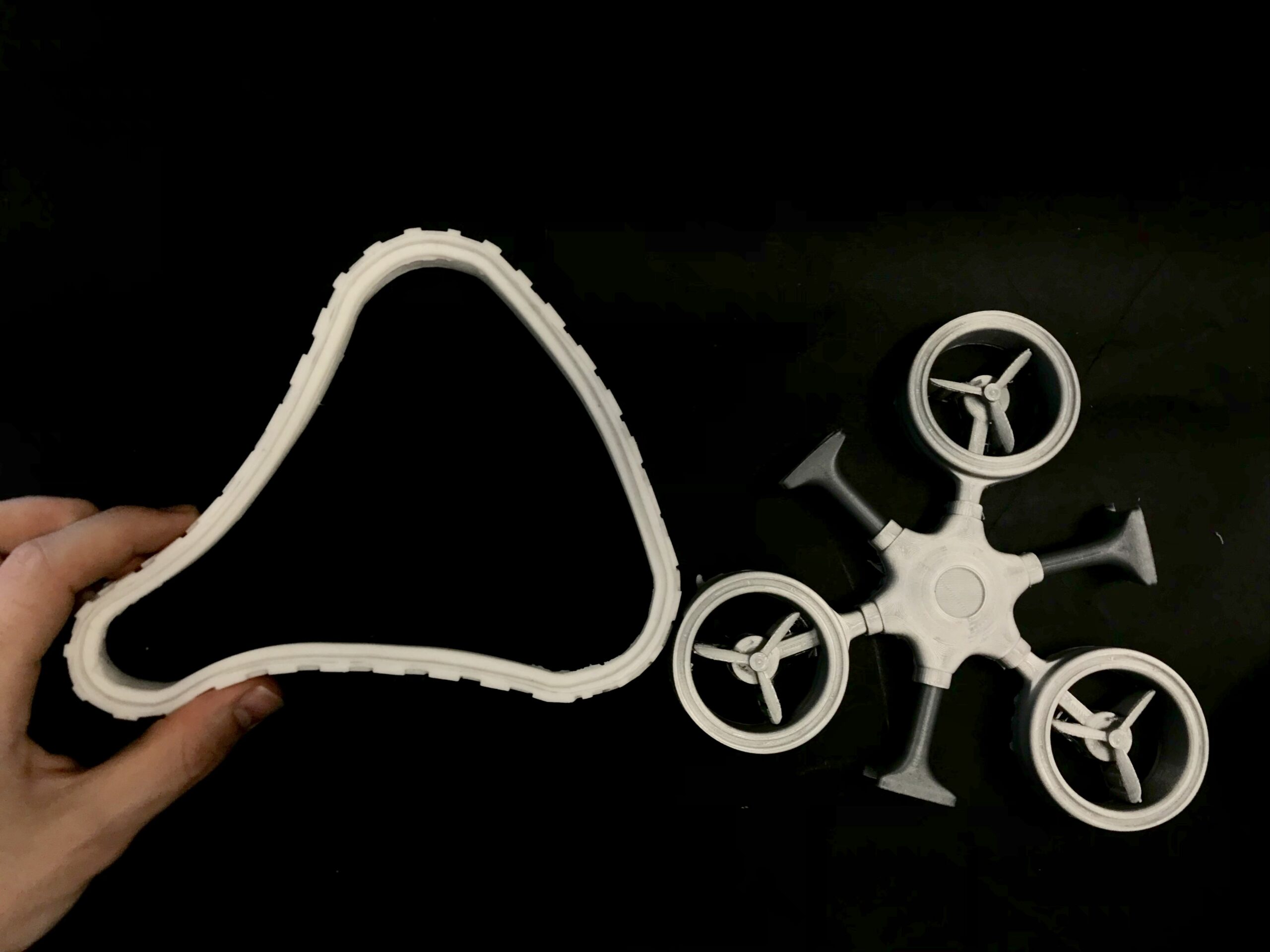
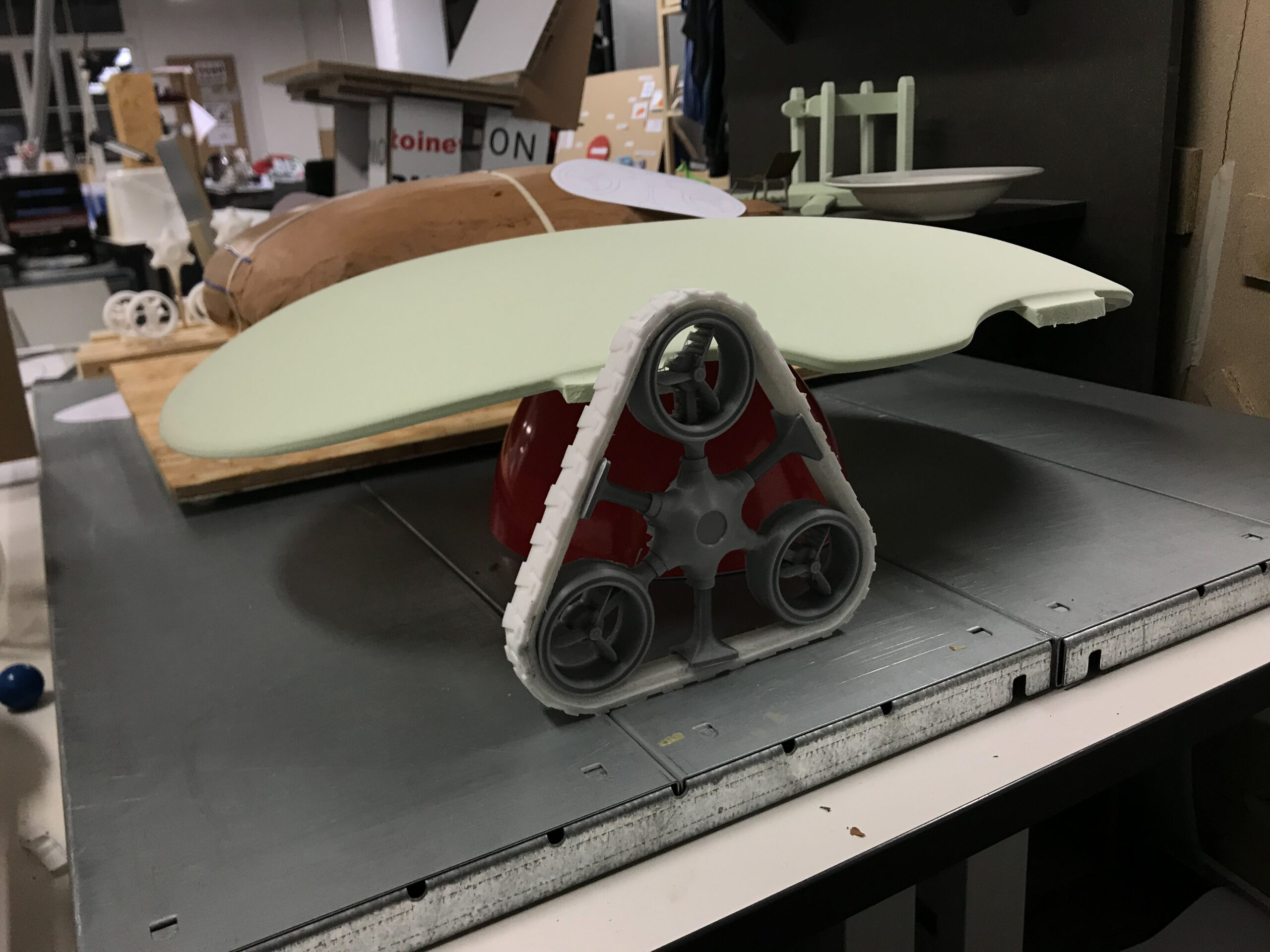
TR3 ist ein futuristisches Umwelt-Roboter-Konzept, dessen Hauptaufgabe die Analyse diverser Umweltaktivitäten ist. Das Projekt konzentriert sich auf das Design des Roboters, welcher sich auf Land, Unterwasser sowie in der Luft bewegen kann. Um dies zu ermöglichen, haben wir ein Rad-System entwickelt, welches dieses zum Hauptmerkmal des Roboters macht. Die Räder fungieren zusammen mit dem klassischen Raupensystem als Landantrieb. Zusätzlich können sie sich um ihre eigene Achse drehen, um grössere Hindernisse zu überwinden. Durch den symmetrischen Aufbau des Roboters, können sich die Räder beidseitig nach hinten drehen, wodurch diese zum Unterwasserantrieb werden. Da die Navigation in den Bergen manchmal schwierig sein kann, unterstützen auch hier die Räder. Um die Stabilität zu gewährleisten, kann TR3 seinen gesamten Körper auf den Boden absenken und schliesslich ein oder mehrere Räder lösen. Diese fungieren nun als Drohnen, um die Berge aus der Luft zu kartieren und den besten Weg zu bestimmen.
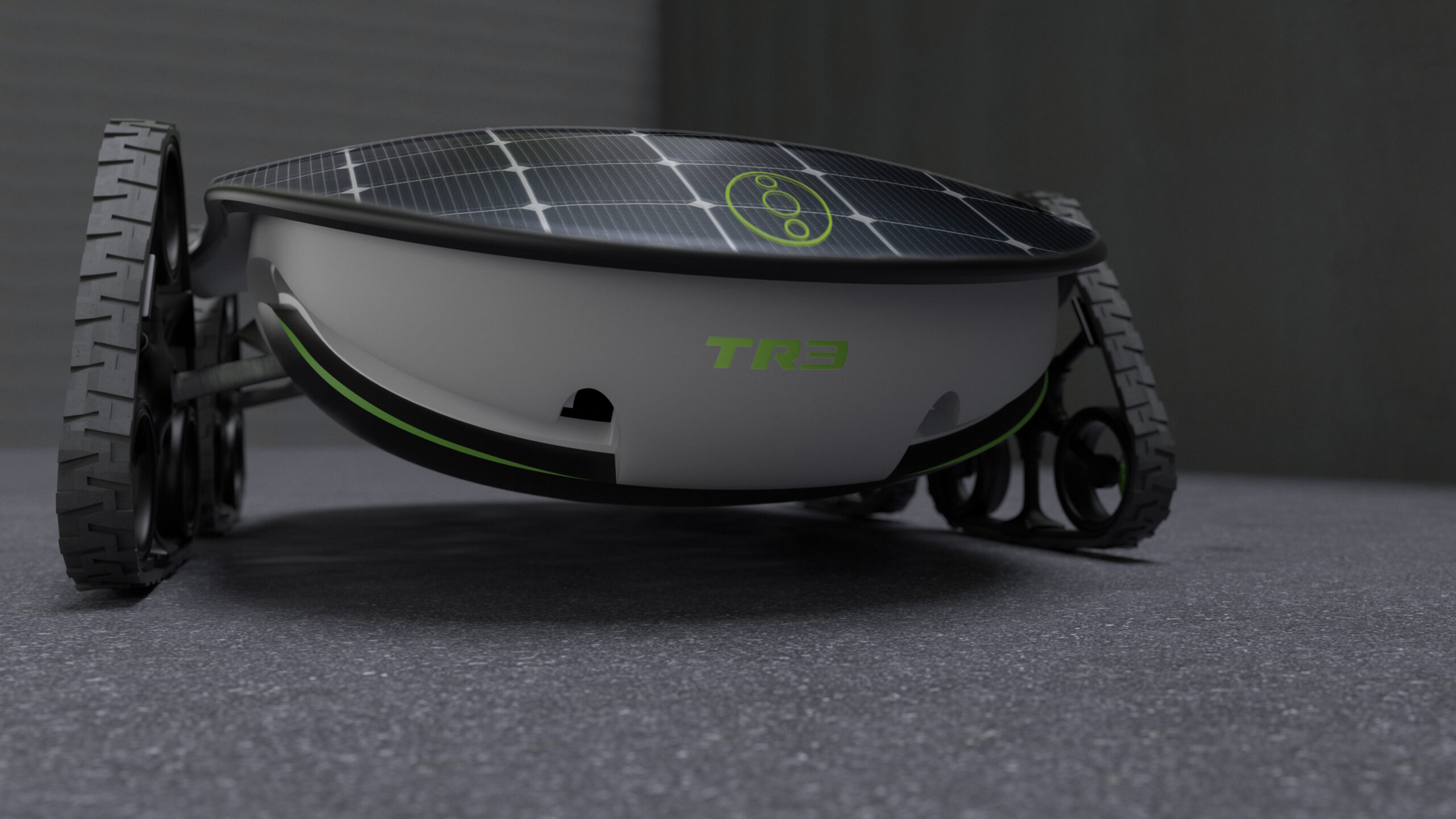


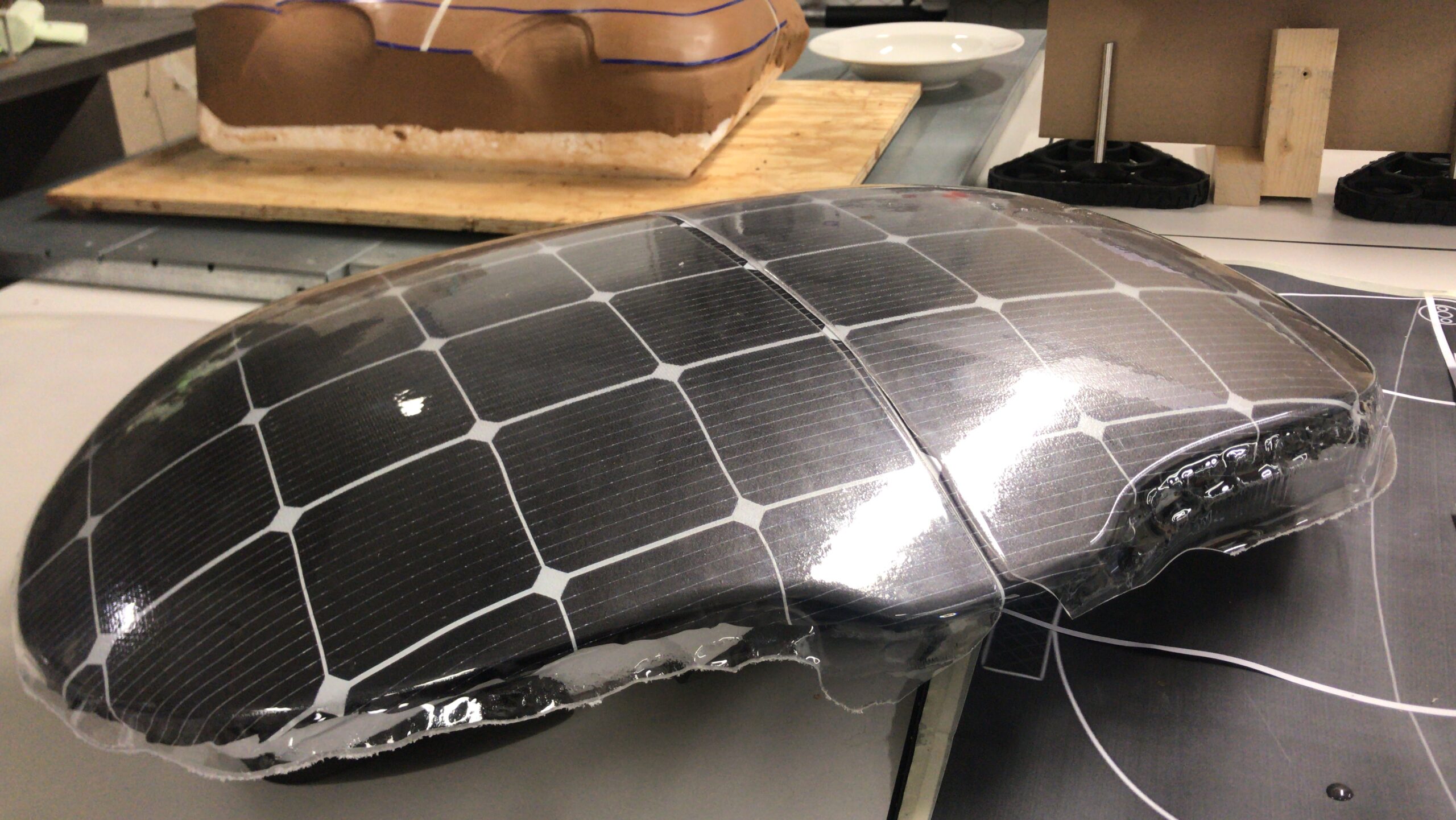
Das multifunktionale Rad-System integriert sich in die Designsprache des Roboters. Das leicht bionisch angedeutete Design verbindet sich mit seiner Umgebung. Durch das flexible Solarpanel auf der Haube kann sich TR3 individuell bewegen oder das nächste Aufladecenter erreichen.




























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}